Proper termination of all high frequency transmissions lines is critical; unless you want to get some signals reflected, which is not the topic of this little post. For most of the items we deal with, systems are operated at 50 Ohm characteristic impedance, at least when it comes to instrument-to-instrument and sub-system/module connnections, and GHz frequencies.
There are many types of terminations around, from all reputable corporation manufacturing RF parts. Here, we want to look at 5 devices:
(1) Huber+Suhner, Switzerland, N-type termination, rated to 6 GHz – specified maximum SWR: 1.05@1 GHz, 1.1@4 GHz, 1.2@6 GHz
(2) Midwest Microwave, USA, N-type termination Model 2070, rated to 18 GHz – specified maximum SWR: 1.25 up to 18 GHz
(3) Aeroflex, USA, N-type 6 dB attenuator AH-06N, rated to 18 GHz – SWR 1.35 to 12.4 GHz, SWR 1.5 to 18 GHz
(4) and (5) No-name BNC 50 Ohm termination, labeled “+-1%”, connected to the test system with a reasonable quality N to BNC adapter, the two terminations are of the same kind, just two samples to check part-to-part variability
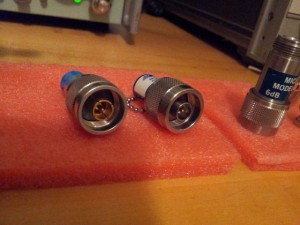
The warriors: Left to right-items 1 to 5

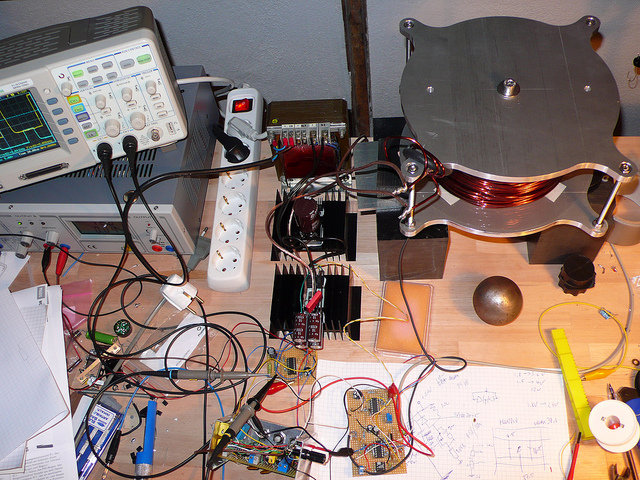
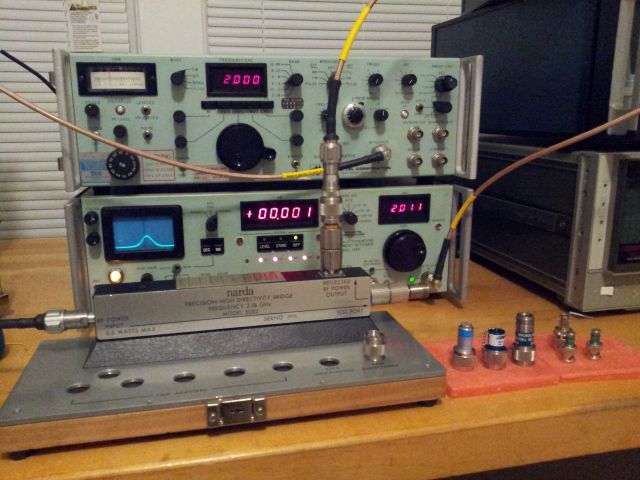
The test setup: Micro-Tel SG-811 Signal Source, Micro-Tel 1295 Precision Attenuation Measurement Receiver, Narda Precision High Directivity Bridge Model 5082, Narda APC-7 to N adapters.

The test procedure: At each frequency, full reflection (open) is used to set the “0 dB” level. Return loss can then be measured directly as attenuation of the reflected signal, when the termination is attached to the test port. To determine the error limits of the SWR measurement, the directivity is known, the insertion loss of the bridge has been measured, and the attenuation measurement error itself (by the Micro-Tel 1295) is negligible.
Results
140827 swr of various terminations d0
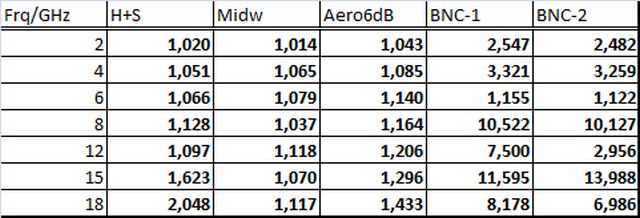
SWR vs. frequency, all terminations
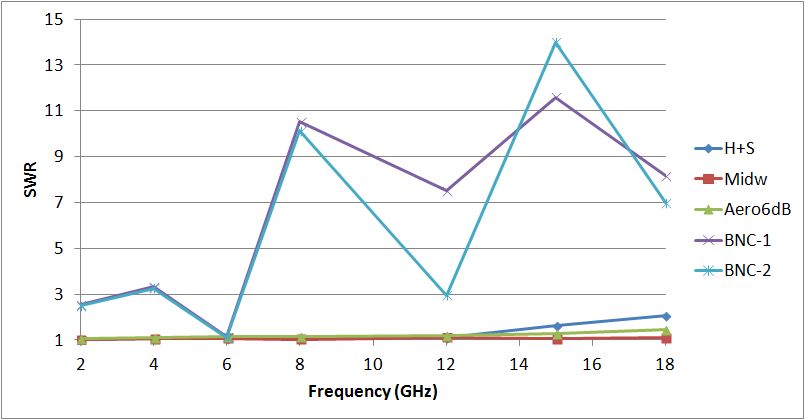
There are clearly two groups, the terminations made for GHz service, and the others – BNC, items (4) and (5), that were not. Interestingly enough, at 6 GHz, these terminations are more or less ideal, with SWR close to 1. So you can use these at exactly 6 GHz, and integer-multiples of 6 GHz, but still, I would suggest not to. They are also working great at DC, because of their “+-1%” accuracy which is mentioned on the label.
SWR vs. frequency, only the items (1) through (3)
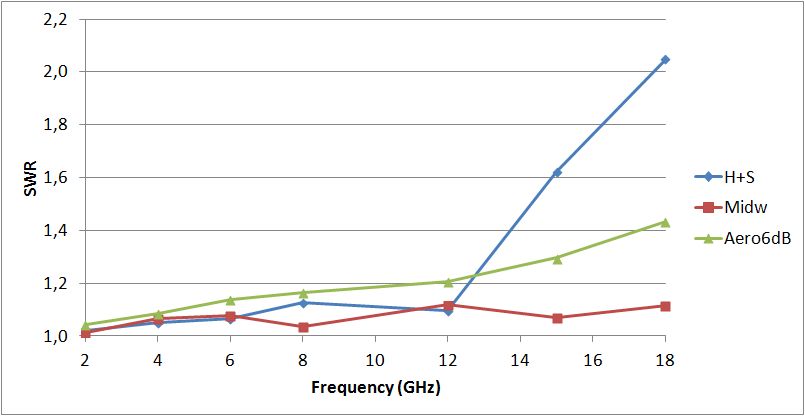
A closer look at the real performers – the Huber+Suhner, although only specified to 6 GHz is working well within its SWR max. 1.2@6 GHz specification, even considering the error limits of this measurement, and can be used up to 12 GHz, no problem.
The Midwest Microwave 2070 – I like this model very much, because of the rugged stainless steel construction (nothing gold-plated and fancy; you can get these for a few dollars, from surplus). It is way better than specified (SWR max. 1.25, measured: 1.12) – and, at 18 GHz, within the limits of the HPAK 909F Precision Coaxial Termination, intended as calibration standard, and listed for close to 1 k$.
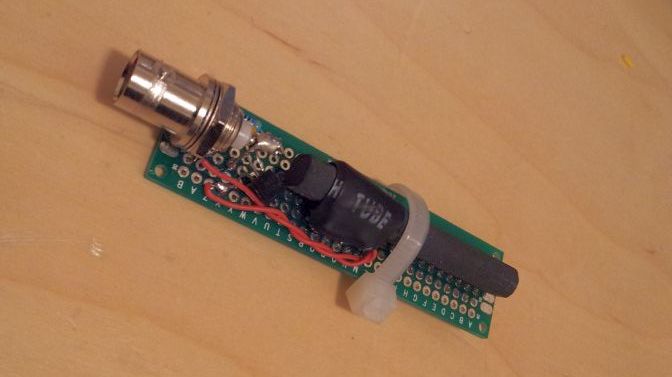
A little hint – how to distinguish really high frequency N-type parts (18 GHz), from regular, say, several GHz (below 12 GHz) parts: the shield of the “precision” N-type connector is a non-slotted (see picture-right termination), where as the regular N connectors have a slotted shield, typically, 4 slots (see picture-left termination):