Thanks to a rainy late afternoon (and evening), some success with getting the SG-811 signal generator phase locked. For external frequency control, the SG-811 needs a coarse tune voltage, to adjust the frequency to within a few MHz of the target. This is done using a DAC8830(=MAX541) 16 bit DAC and OP284 opamp to scale the 0 to 2.5 V of the DAC to 0 to 10 V required for the coarse tune input of the SG-811.
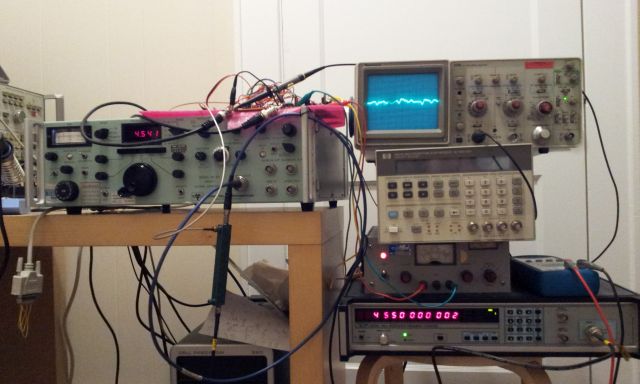
The SG-811 is run at a level of +5 dBm, and a directional coupler is used to get a sample of this signal (about -5 dBm) into a ADF41020 single chip PLL. The remainder of the signal is fed into a EIP 454A microwave counter, which also provides a 10 MHz reference for the PLL.
First, it turned out that the SG-811 uses a different voltage range (-3 to 3 V) for the phase lock input, compared to the Micro-Tel 1295 (0 to 10 V). So the 8904A was used to determine the phase lock input sensitivity (deviation in MHz per Volt). Some existing AVR code (the whole setup is controlled by an ATMega32L) was modified to fit the SG-811 requirements. This code has some nice features, including a self-adjusting coarse tune voltage. This is of great help because the phase lock input of the SG-811 only allows for a few MHz frequency shift, and during warm-up the generator can easily drift out of the lock window, if the coarse tune value is left unadjusted. Obviously, the coarse tune voltage is changed in very small steps, 1 LSB at a time.
Drop me a line if you are interested in more details.
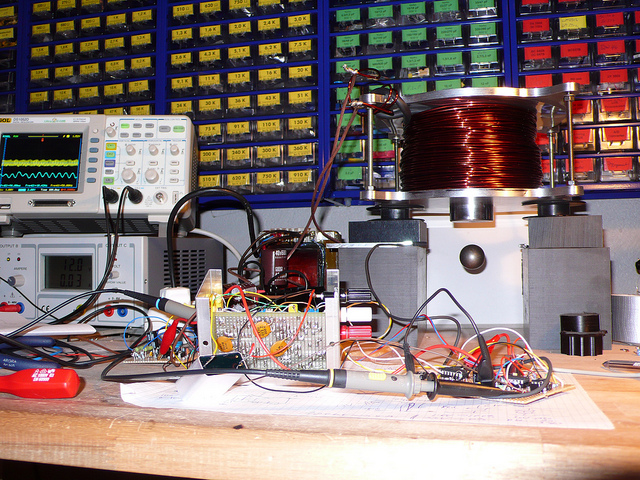
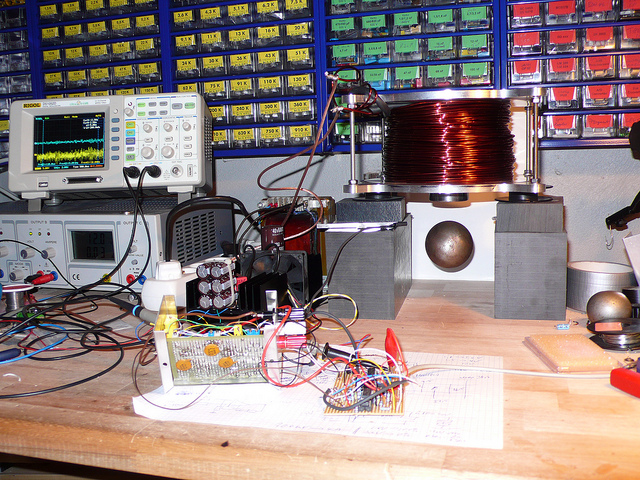
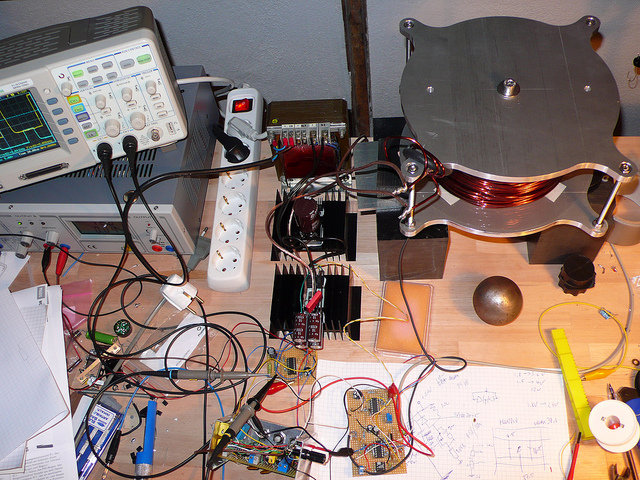
The (temporary) test setup, set to an arbitrary value of 4.5500 GHz.
The control circuitry
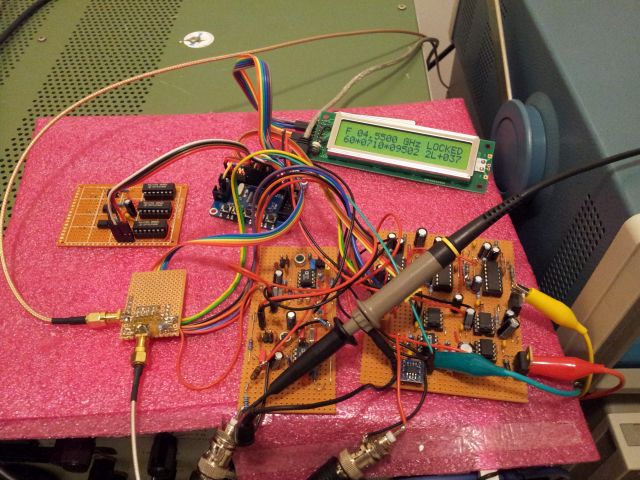
Display shows (second line): Divider values of the PLL, DAC coarse tune value (0 to 65535), band, and phase control voltage (deviation from mid-point in mV, +-100 mV are perfectly fine, if +-50 mV are reached with drift correction activated, the DAC coarse tune will be automatically adjusted to get the phase control voltage back to less than +-10 mV).
Last but not least, also the shift register board, 3x LS164 (for remotely controlling the band switches) has been connected to the AVR micro, and all is functional.